Robots continue to demonstrate their value as flexible manufacturing tools in many industry sectors and applications. It is no surprise therefore that when CME Limited were approached to develop a fully automated solution for pneumatic valve assembly, a six-axis robot is at the heart of their innovative system.
The robot performs a series of different pick and place, orientation, transfer, and assembly operations in combination with several dedicated workstations and peripheral technologies, increasing output and productivity, automatically assembling six hundred parts in an 8-hour shift.

(The automated production cell from CME produces 600 parts in an 8-hour shift)
Leveraging the flexibility of robot technology
This application requires the assembly of a pneumatic valve body which comprises of a number of individual component parts. These include the body itself, a coil, circlip, a label and adhesive. The parts will be collected by the robot from a series of magazine drawer systems which are used to both present the individual parts and store the fully assembled items.
Historically the assembly of these valve bodies was performed manually, with an operator requiring 90 seconds to complete the various tasks for a single valve assembly. There were several objectives targeted as part of the transition from manual to fully automated assembly. These included eliminating repetitive manual tasks, reducing the time needed for assembly and subsequently increasing productivity whilst reducing manufacturing costs. The automation of the different assembly operations also makes it possible to introduce additional quality checks which improve quality and yield.
The system is manually primed with the various component parts needed to complete the assembly process. Six cabinets, each holding 100 components are positioned around the rear of the robotic cell. Three of these are loaded with trays containing valve bodies and the remaining three with trays containing coils. As part of the assembly process, the robot is also used to open and close the drawer magazine systems to collect and replace parts.
The robot initially collects a coil which is then checked by a vision system to determine the orientation of the cables on the coil. The coil is then re-orientated and located in a jig by a separate unit ready for assembly. Meanwhile the robot has collected an outer body component which is moved and rotated 90 degrees by the robot, before being positioned under a labelling system which dispenses and attaches a sticker over a threaded hole on the part.
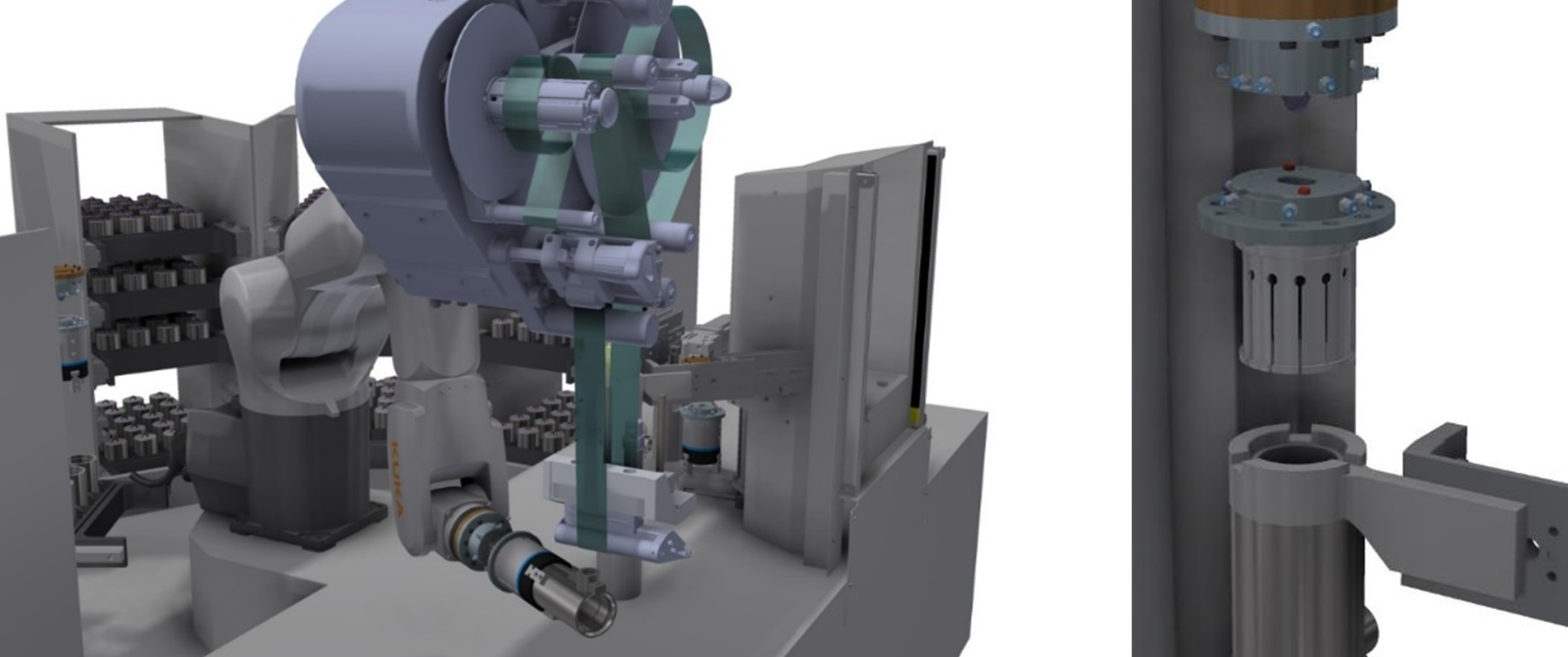
(LEFT: The robot presents the body to a label dispensing station and RIGHT: The robot changes tools to perform the circlip insertion operation)
The body is then lowered into a jig to begin the assembly operations, before the robot collects the coil, orientating it using the data obtained by the vision system. This positions the cables at the correct angle for further processing at a later stage. The coil is then partially lowered into the outer body and released by the robot, with the final assembly into the body controlled by a separate mechanism.
The robot then collects a circlip which is placed to a jig ready for assembly, before performing a tool change operation. This allows the robot to press the circlip into position. The final operation is the automated dispensing of adhesive in two locations to secure the circlip within the assembly. The robot then removes the finished part and transfers it back to the magazine drawer system.
The cycle repeats with the outer body components in the drawers being replaced with assembled valves until the drawer is full, closed and a new drawer is opened. Cell capacity is three hundred assemblies before it is required to be re-primed with fresh components. Total run-time to empty, without stoppages, is approximately 4 hours with an average cycle time of 48 seconds. This cycle time represents a saving of over 45% on the original manual cycle time of 90 seconds. The system achieves all of the initial objectives, and a further benefit is the fact that the system is capable of being re-tooled to produce other part variants in future.





